AC motors operate on the same fundamental principle, but by making small design modifications, you can tailor their performance to better suit specific applications. In the previous post, I focused on AC induction motors for unidirectional use. This time, I will explain why AC reversible motors and AC electromagnetic brake motors are ideal for start/stop, reversing, or vertical applications, and demonstrate how to operate them.
Reversible Motors
Let's start by clarifying why these motors are called "reversible." All permanent split capacitor type AC motors are technically reversible. However, induction motors cannot reverse direction instantly—they must come to a complete stop first. Reversible motors, on the other hand, can change direction much more quickly. For example, while induction motors require switching lead wires to reverse, they have an overrun of about 30 revolutions, whereas reversible motors only have around 5 revolutions. This makes them more suitable for applications where instant reversal is necessary.
The term "overrun" refers to the number of motor shaft revolutions it takes for the motor to stop once power is removed. According to Newton’s First Law of Motion, an object in motion tends to stay in motion unless acted upon by an external force—like friction. In induction motors, the main source of friction is the ball bearings, leading to longer overrun. Reversible motors, however, include a friction brake that significantly reduces this overrun.
| Reversible motors are ideal for start/stop or reversing applications that require shorter overrun than induction motors, such as reversing conveyors. They generate more heat, so a 50% duty cycle is recommended (with a maximum of 30 minutes of continuous operation). |
 |
Design Comparison to Induction Motors
| Structure of Induction Motors |
Structure of Reversible Motors |
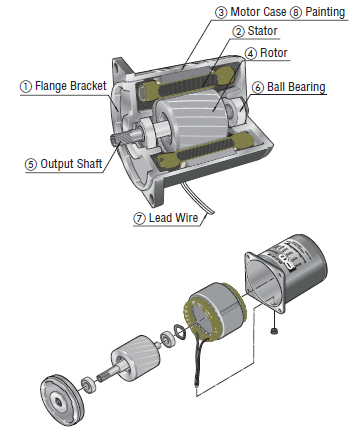 |
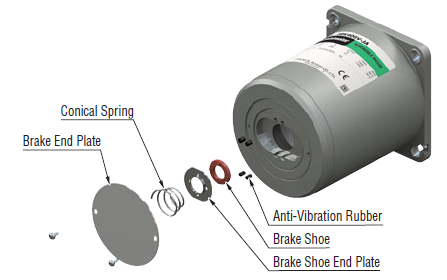
Same as induction motors except for additional friction brake components listed below:
|
The main difference between an induction motor and a reversible motor is the addition of a friction brake, which drastically reduces overrun and allows for quick start/stop and reversing operations. The friction brake uses a spring to press against the armature, reducing overrun when the motor stops. While the holding torque from the friction brake is only about 10% of the motor’s output torque, it can be increased through gear ratios. However, its primary purpose is to reduce overrun, not to hold a load vertically.
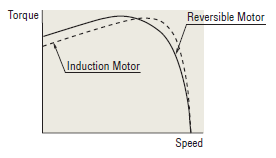
Another key design feature is the balanced winding, which ensures equal torque regardless of the direction of rotation. Combined with the friction brake, this allows for smooth and immediate direction changes.
| Since the friction brake constantly rubs against the armature, a higher-rated capacitor is used in reversible motors to increase starting torque during both startup and reversal. Due to increased operating temperatures, the duty cycle is typically limited to 50% (50% on, 50% off). As long as the motor case temperature stays below 100°C, the motor should last. |
 |
Theory of Operation
When power is applied to the stator windings, a rotating magnetic field is generated around the rotor at the frequency of the AC current. Using Fleming’s left-hand rule, this magnetic field induces a current in the aluminum bars of the rotor, creating opposing magnetic fields (Lenz’s Law). These fields interact with the stator’s rotating field, causing the rotor to rotate.
|
Want to know more about operational theory of AC motors?
 hbspt.cta._relativeUrls=true;hbspt.cta.load(2284573, '790f02f2-dde7-4197-bc9e-3256c1f04309', {"useNewLoader":"true","region":"na1"});
hbspt.cta._relativeUrls=true;hbspt.cta.load(2284573, '790f02f2-dde7-4197-bc9e-3256c1f04309', {"useNewLoader":"true","region":"na1"});
|
Wiring
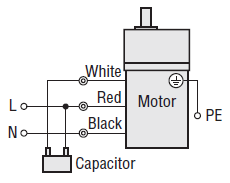
Here is the wiring diagram for single-phase reversible motors (similar to single-phase induction motors). Three-phase reversible motors are less common because they are often used with inverters or VFDs for continuous speed control. The rotation direction is indicated when viewed from the output shaft side of the motor.

Although the theory of operation is similar across all single-phase permanent split capacitor motors, the lead wire colors may vary. For a standard 3-wire motor, the lead wire colors are white, red, and black. Black is always connected to neutral (N), and both white and black are connected to the two terminals of the dedicated capacitor. When the live (L) is connected to either the black or red via the capacitor terminal, the motor will start rotating in the intended direction. For terminal box type motors, the process is the same, but the terminals are labeled Z2, U2, and U1.
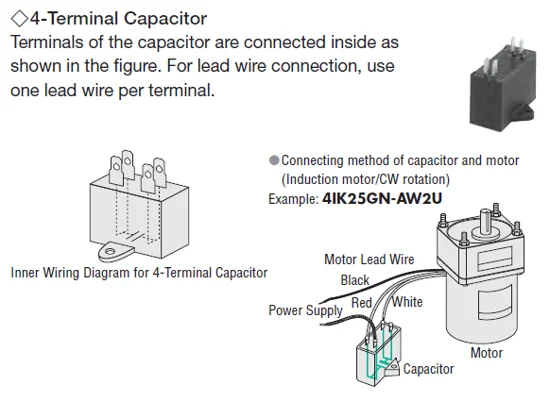
The Capacitor
The capacitor is essential for the starting operation of single-phase motors. Without it, you would need to manually start the motor by turning the shaft. This is similar to how old airplane propellers were started. Make sure to connect the capacitor correctly—this was a common issue I encountered during my time as a tech support engineer.
Here is an example of how to wire a 4-terminal capacitor with a single-phase motor.
| Don’t be confused by the number of terminals on the capacitor. The internal wiring diagram shows that the two closest terminals are internally connected. Electrically, this is equivalent to a traditional two-terminal capacitor. |
 |
| As with all motors, make sure to ground the motor using its dedicated protective earth grounding terminal (PE) to prevent shocks or injuries. |
 |
Here is a video showing the standard wiring configuration.
 hbspt.cta._relativeUrls=true;hbspt.cta.load(2284573, '1fbc2381-431c-4536-906f-16d817df9f61', {"useNewLoader":"true","region":"na1"});
hbspt.cta._relativeUrls=true;hbspt.cta.load(2284573, '1fbc2381-431c-4536-906f-16d817df9f61', {"useNewLoader":"true","region":"na1"});
Electromagnetic Brake Motors
Similar to reversible motors, electromagnetic brake motors are reversible motors equipped with an electromagnetic brake that engages when power is turned off. Since the base motor is a reversible motor, the duty cycle remains at 50% (with a maximum of 30 minutes of continuous operation). The main difference is that electromagnetic brake motors offer shorter overrun and more holding torque.
| Electromagnetic brake motors are designed for vertical applications, such as elevators. The power-off-activated electromagnetic brake produces close to the motor's rated torque, helping to keep the load secure if power fails during operation. |
 |
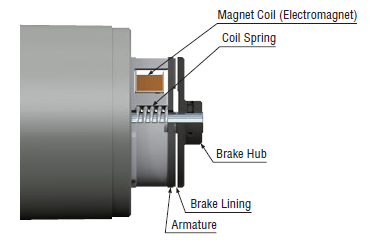
The electromagnetic brake is designed to lock the motor shaft and hold the load in place. It also reduces the overrun from 30 revolutions to about 2 revolutions. For start/stop applications, the maximum operating cycle of the electromagnetic brake is 50 cycles per minute or less. For higher cycles, a brake pack, clutch and brake type motor, or high efficiency stepper motors are recommended.
| The electromagnetic brake uses the same voltage as the motor and is designed to engage and lock the load in place. When the magnet coil is energized, it becomes an electromagnet and attracts the armature against the spring force, releasing the brake and allowing the motor shaft to rotate freely. When the magnet coil is not energized, the spring presses the armature onto the brake hub and holds the motor shaft in place. |
 |
Compared to induction and reversible motors, the wiring method for electromagnetic brake motors is more complex due to the added components. A capacitor is also required for single-phase models. Three-phase versions are available for variable speed applications, as the base motor is a continuous-duty induction motor rather than a duty-limited reversible motor.
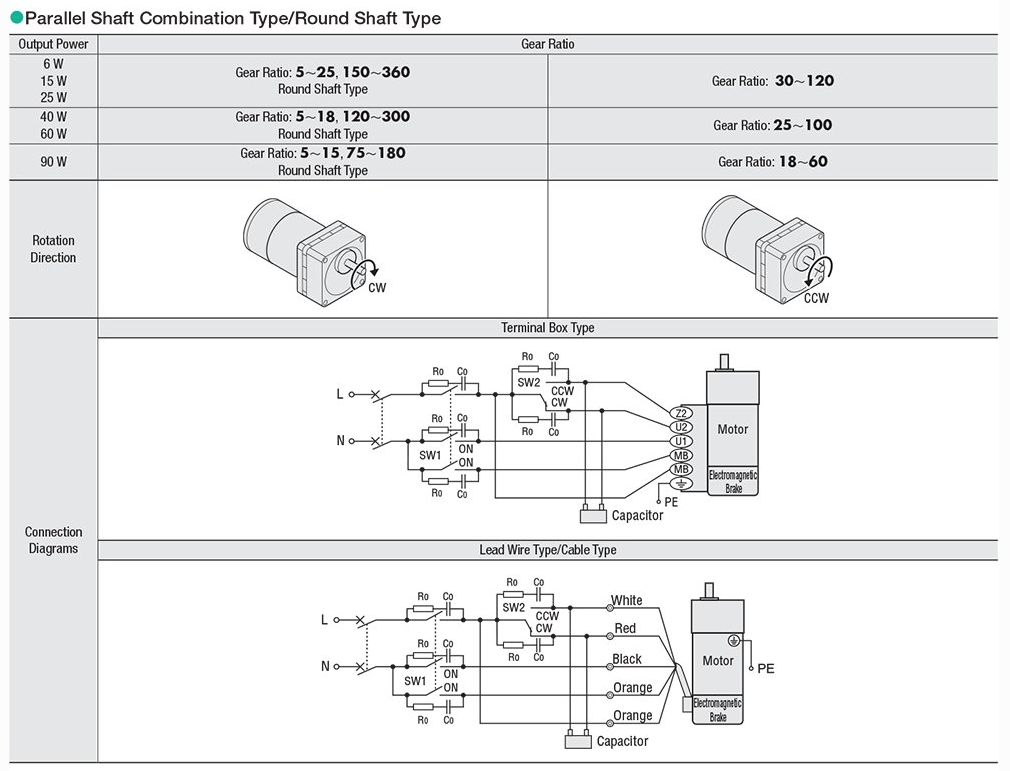
If you follow the wiring diagram above and use the specified switches, the electromagnetic brake will automatically engage when the motor stops and disengage when the motor runs. The SW1 switch controls both the motor and brake power, while the SW2 switch controls the motor direction.
Here is a demonstration video showing the proper wiring, including circuit breakers, switches, and CR modules for surge suppression.
Overrun and Duty Cycle Comparison
Here is a summary of the main differences between induction motors, reversible motors, and electromagnetic brake motors.
| Type of Motor |
Overrun |
Duty Cycle |
| Induction Motor |
30~40 revolutions |
Continuous |
| Reversible Motors |
5~6 revolutions |
50% |
| Electromagnetic Brake Motors |
2~3 revolutions |
50% |
The overrun value is measured for the motor shaft. Adding a gearhead with a high gear ratio, increasing friction, or reducing load inertia can help reduce the overrun.
The duty cycles mentioned are recommended values. As a general rule, as long as the motor case temperature stays below 100°C, the motor should perform well.
That's it for AC reversible motors and AC electromagnetic brake motors. Stay tuned for a future post about torque-speed characteristics of AC motors, and don't forget to subscribe!
|
Learn more about KII & KIIS Series
Here’s a short video explaining the KII & KIIS Series AC induction motors, AC reversible motors, and AC electromagnetic brake motors, along with their intended applications.
|
|
hbspt.cta._relativeUrls=true;hbspt.cta.load(2284573, '1fbc2381-431c-4536-906f-16d817df9f61', {"useNewLoader":"true","region":"na1"});
Natural Soap Powder
Natural Soap Powder,Detergent Soap Powder,Detergent Use Soap Powder,Detergent Natural Soap Powder
Ningbo Jiahe New Materials Technology Co.,ltd , https://www.cnjhchem.com